
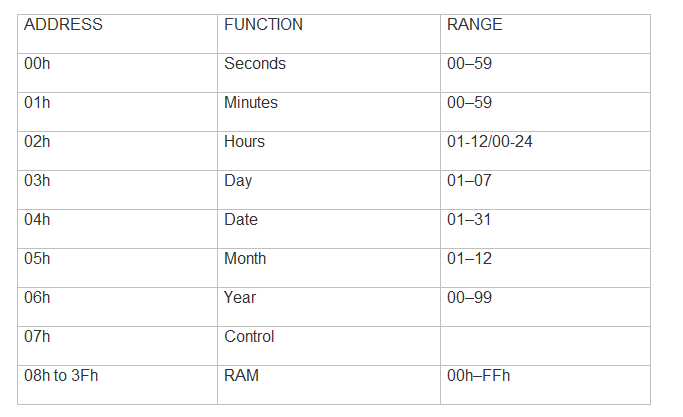
The RTC keeps the date and time arranged in it's memory as shown below:
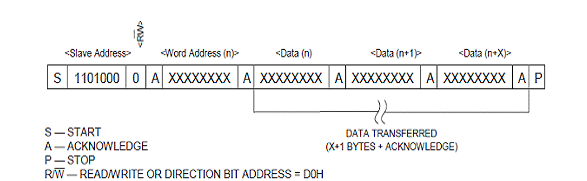
Slave Receiver Mode (Write Mode)
Data Write Cycle
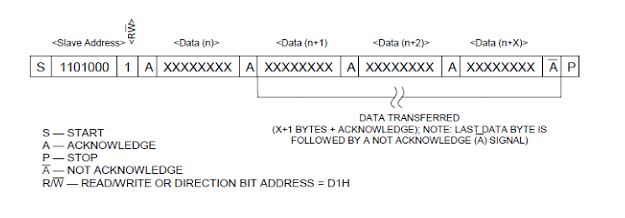
Slave Transmitter Mode (Read Mode)
Data Read Cycle
TWI Status Register – TWSR

Bits 7..3 – TWS: TWI Status
Bit 2 – Res: Reserved Bit
Bits 1..0 – TWPS: TWI Prescaler Bits:
TWI Data Register – TWDR

Bits 7..0 – TWD: TWI Data Register
/* Name : main.c
* Purpose : Source code for RTC interface with ATMEGA16.
* Author : Gemicates
* Date : 2017-09-07
* Website : www.gemicates.org
* Revision : None
*/
#ifndef F_CPU
#define F_CPU 8000000UL // 8 MHz clock speed
#endif
#include <avr/io.h>
#include <util/delay.h>
#define UCSRA
#define UCSRB
#define UCSRC
#define UDR
#define UBRRL
void init_i2c()
{
TWSR = 0X00;
TWBR = 0X47;
TWCR = (1<<TWEN);
}
unsigned char read_i2c()
{
TWCR = (1<<TWINT)|(1<<TWEN);
while(!(TWCR & (1<<TWINT)));
return TWDR;
}
void write_i2c(unsigned char ch)
{
TWDR = ch;
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWEA);
while(!(TWCR&(1<<TWINT)));
}
void start()
{
TWCR = (1<<TWINT)|(1<<TWSTA)|(1<<TWEN);
while((TWCR &(1<<TWINT))==0);
}
void stop()
{
TWCR = (1<<TWINT)|(1<<TWEN)|(1<<TWSTO);
_delay_ms(1);
}
void rtc_write(char dev_addr,char dev_loc,char dev_data)
{
start();
write_i2c(dev_addr);
write_i2c(dev_loc);
write_i2c(dev_data);
stop();
_delay_ms(10);
}
unsigned char rtc_read(char dev_addr,char dev_loc)
{
char ch;
start();
write_i2c(dev_addr);
write_i2c(dev_loc);
start();
write_i2c(dev_addr|0x01);
ch = read_i2c();
stop();
return ch;
}
void tx( unsigned char data )
{
while ( !(UCSRA (1<<UDRE)) ); // wait until UDR is empty
UDR data;
}
char rx()
{
while ( !(UCSRA (1<<RXC)) ); // wait until UDR is empty
return UDR;
}
void init_serial()
{
UCSRB (1<<RXEN)|(1<<TXEN);
UCSRC (1<<UCSZ1)|(1<<UCSZ0);
UBRRL 51;
}
void str_serial(char *str)
{
while(*str)
{
tx(*str++);
_delay_ms(1);
}
}
void disp_time_date()
{
char ch;
tx(254);
tx(128);
str_serial("Time: ");
ch = rtc_read(0xd0 , 0x02);
tx(ch/16+48);
tx(ch%16+48);
tx('-');
ch = rtc_read(0xd0 , 0x01);
tx(ch/16+48);
tx(ch%16+48);
tx('-');
ch = rtc_read(0xd0 , 0x00);
tx(ch/16+48);
tx(ch%16+48);
tx(254);
tx(192);
str_serial("Date: ");
ch = rtc_read(0xd0 , 0x04);
tx(ch/16+48);
tx(ch%16+48);
tx('-');
ch = rtc_read(0xd0 , 0x05);
tx(ch/16+48);
tx(ch%16+48);
tx('-');
ch = rtc_read(0xd0 , 0x06);
tx(ch/16+48);
tx(ch%16+48);
}
int main()
{
DDRC =0XFF; DDRD =0XFF;
init_i2c();
init_serial();
rtc_write(0xd0,0x00,0x00);
rtc_write(0xd0,0x01,0x27);
rtc_write(0xd0,0x02,0x08);
rtc_write(0xd0,0x04,0x08);
rtc_write(0xd0,0x05,0x09);
rtc_write(0xd0,0x06,0x13);
_delay_ms(10000);
while(1)
{
disp_time_date();
}
}